I’m currently a PhD student in Prof. Angela Dai’s 3D AI Lab at TU Munich. My research focuses on data-driven 3D reconstruction and scene understanding. In particular, I’m interested in incorporating semantic or geometric priors into 3D reconstruction.
Previously, I was a research assistant working with Prof. Min Sun at National Tsing Hua University (NTHU). I received MSc and BSc degrees in Computer Science at National Taiwan University (NTU), where I worked on 3D point cloud understanding and robotic grasping with Prof. Winston Hsu.
Publications


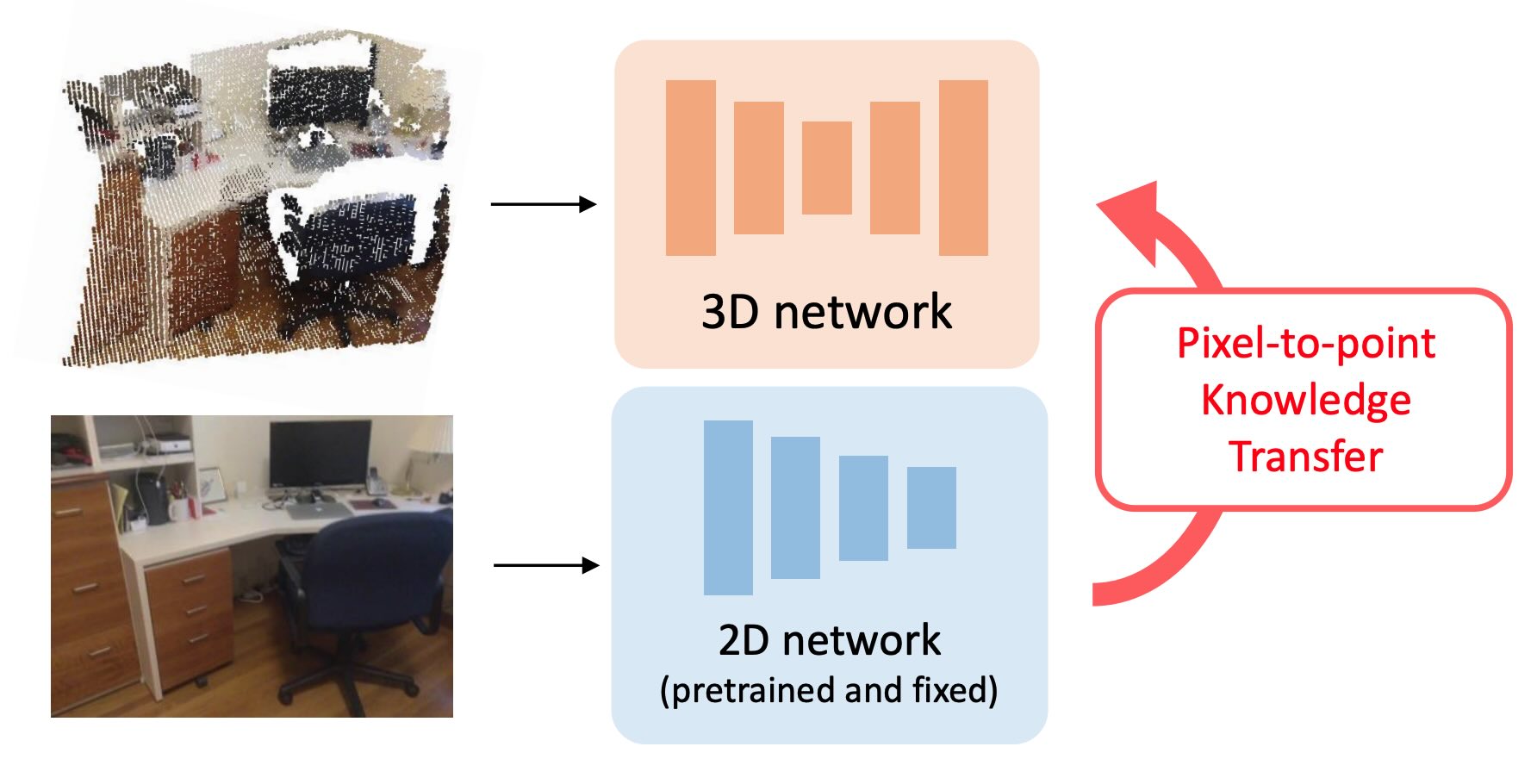
Learning from 2D: Contrastive Pixel-to-Point Knowledge Transfer for 3D Pretraining
arXiv preprint, 2021
S3: Learnable Sparse Signal Superdensity for Guided Depth Estimation
Conference on Computer Vision and Pattern Recognition (CVPR), 2021
Teaching
-
Teaching Assistant. Network Administration and System Administration at National Taiwan University. Spring 2017
-
Teaching Assistant. Machine Learning for 3D Geometry at Techincal University of Munich. Winter 2023 - Summer 2026.
-
Teaching Assistant. Seminar for 3D Machine Learning at Techincal University of Munich. Summer 2026.
Misc
- Look Mom, I’m on TV: YouTube (Chinese)