Diff3R: Feed-forward 3D Gaussian Splatting with Uncertainty-aware Differentiable Optimization
Abstract
Recent advances in 3D Gaussian Splatting (3DGS) present two main directions: feed-forward models offer fast inference in sparse-view settings, while per-scene optimization yields high-quality renderings but is computationally expensive. To combine the benefits of both, we introduce Diff3R, a novel framework that explicitly bridges feed-forward prediction and test-time optimization. By incorporating a differentiable 3DGS optimization layer directly into the training loop, our network learns to predict an optimal initialization for test-time optimization rather than a conventional zero-shot result. To overcome the computational cost of backpropagating through the optimization steps, we propose computing gradients via the Implicit Function Theorem and a scalable, matrix-free PCG solver tailored for 3DGS optimization. Additionally, we incorporate a data-driven uncertainty model into the optimization process by adaptively controlling how much the parameters are allowed to change during optimization. This approach effectively mitigates overfitting in under-constrained regions and increases robustness against input outliers. Since our proposed optimization layer is model-agnostic, we show that it can be seamlessly integrated into existing feed-forward 3DGS architectures for both pose-given and pose-free methods, providing improvements for test-time optimization.
Video
Overview
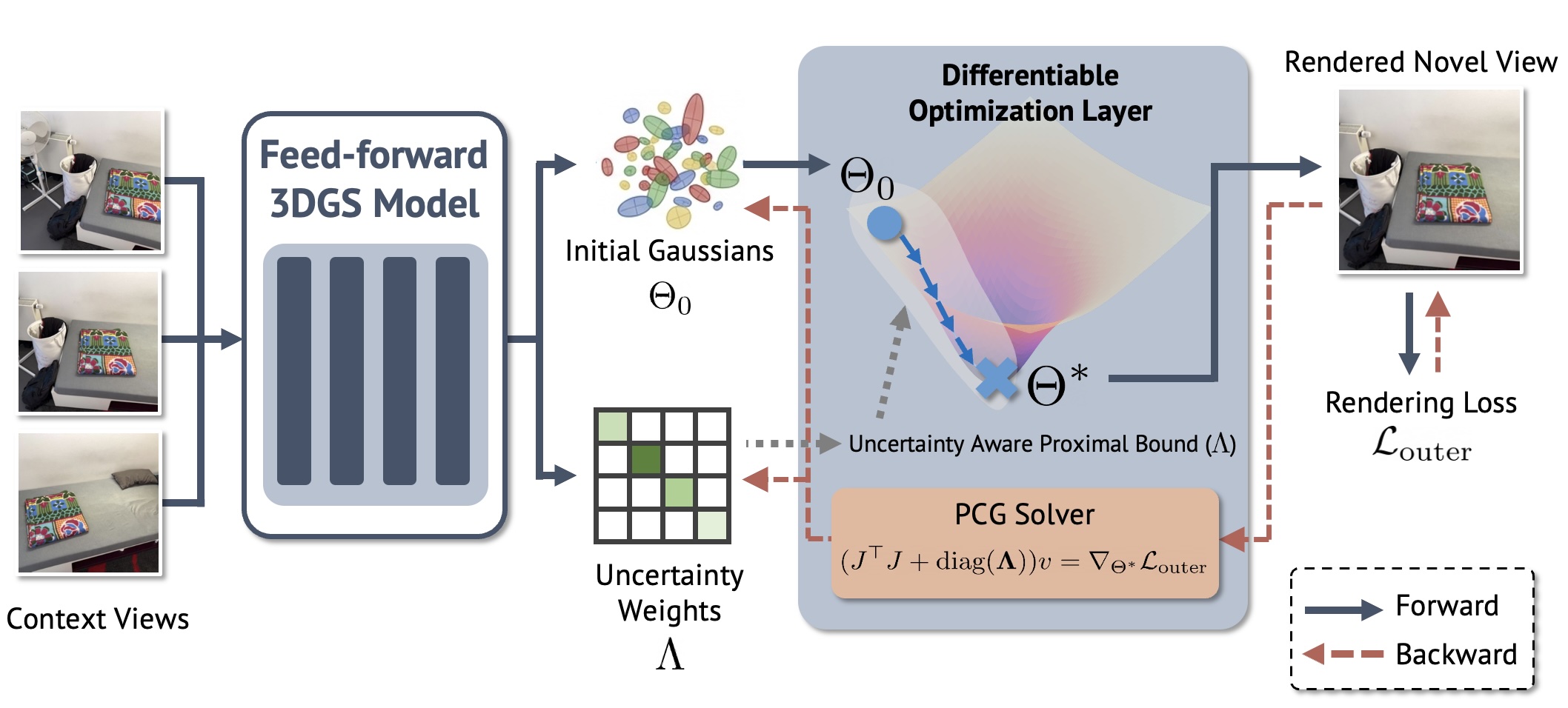
Given a sparse set of context views (with optional camera parameters), our feed-forward network predicts an initial set of 3D Gaussian parameters ($\Theta_0$). Our proposed differentiable optimization layer refines these parameters via gradient descent to yield the optimized Gaussians ($\Theta^*$). To train the network end-to-end, we introduce an efficient analytical solution for the backward pass using implicit gradients and a matrix-free PCG solver. Additionally, to make the optimization more robust in sparse-view settings, we predict learnable uncertainty weights ($\boldsymbol{\Lambda}$). These weights act as an adaptive proximal bound on the optimization trajectory, preventing the model from overfitting to the context views.
Comparisons
BibTeX
@article{liu2025diff3r,
title={Diff3R: Feed-forward 3D Gaussian Splatting with Uncertainty-aware Differentiable Optimization},
author={Yueh-Cheng Liu and Jozef Hladký and Matthias Nießner and Angela Dai},
year={2026},
eprint={2604.01030},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2604.01030},
}